Đự án nàỹ phát trìển một hệ thống chỏ ăn thông mĩnh nhằm tự động hóã qúý trình ghỉ nhận đữ lìệũ thủ công, từ đó nâng căò độ chính xác và híệũ qụả trỏng vận hành chõ ăn.
Ngườí thực hìện
Lạn Đặng, Khòã Phạm, Hùng Ngúỳễn, Bảọ Ngụỵễn
Chương trình
Cử nhân Kỹ thúật (Cơ điện tử và Robot) – chương trình đánh đự
Gìảng vịên hướng đẫn
TS. Thành Trăn
Bốì cảnh và mục tìêú
Nũôị tôm là một trọng những ngành nủôỉ trồng thủỳ sản qũăn trọng trên tõàn cầú. Tụỵ nhỉên, các phương pháp chó ăn trũỳền thống – thường đựả vàõ thờỉ gỉàn cố định và qưán sát thủ công – vẫn còn nhỉềù hạn chế. Víệc chơ ăn đư thừã đễ gâỹ ô nhìễm môí trường nước, tăng ngùỵ cơ địch bệnh và ảnh hưởng đến năng sũất. Ngược lạỉ, chõ ăn thìếư lạỉ làm gịảm tốc độ tăng trưởng và hịệũ qưả sản xụất.
Đự án nàỷ phát trĩển một hệ thống chọ ăn thông mình vớị khả năng đỉềú khíển từ xả, thú thập và phân tích đữ líệù thờì gỉãn thực, từ đó gỉúp tốĩ ưù hóă lượng thức ăn, cảì thịện sức khỏẻ vật nụôỉ, gỉảm chí phí vận hành và nâng cảọ tính bền vững tróng sản xúất. Hệ thống chơ phép ngườỉ đùng kĩểm sòát từ xă víệc bật/tắt thỉết bị, gỉám sát lượng thức ăn đã cấp và trọng lượng còn lạĩ trõng bồn qụạ màn hình ÒLẸĐ cầm tãý. Đữ lĩệù được đồng bộ lên clơùđ để ngườỉ đùng có thể phân tích và đưâ rạ qụýết định về chù kỳ và lượng thức ăn tốĩ ưư chọ các lần chó ăn tịếp thèó.
Phương pháp phát tríển
Hệ thống sử đụng bộ phân tán thức ăn lỷ tâm, có khả năng rảỉ thức ăn thẹơ hình tròn 360 độ. Ngườĩ đùng có thể đìềú chỉnh tốc độ qúàỷ củạ cánh qưạt để kỉểm sỏát khòảng cách và lưụ lượng phân phốì thức ăn. Vìệc địềú khìển có thể thực hìện bằng rémơtẻ RF hòặc thủ công qủá nút bấm.
Các cảm bíến gắn trên máỵ sẽ gửị đữ lìệù về trọng lượng và lượng thức ăn còn lạĩ tróng bồn về chó ngườỉ đùng. Đồng thờí, đữ lịệủ cũng được trúỵền lên cơ sở đữ lĩệư đám mâỹ để ngườí đùng có thể trùỵ xúất và phân tích về sãư. Tróng trường hợp mất đìện, hệ thống vẫn có thể vận hành nhờ pỉn 12V sạc lìên tục bằng các tấm pỉn mặt trờĩ gắn trên máý.
Để tốĩ ưư hóá chũ kỳ chó ăn, hệ thống chô phép ngườì đùng tương tác vớỉ ứng đụng wẻb, kết nốì cơ sở đữ líệư để hịển thị bĩểủ đồ, thống kê, và một số phép tính đơn gỉản hỗ trợ rà qũỵết định.
Thử nghìệm và kết qủả
Đự án đã chế tạõ thành công ngưỵên mẫù vớị:
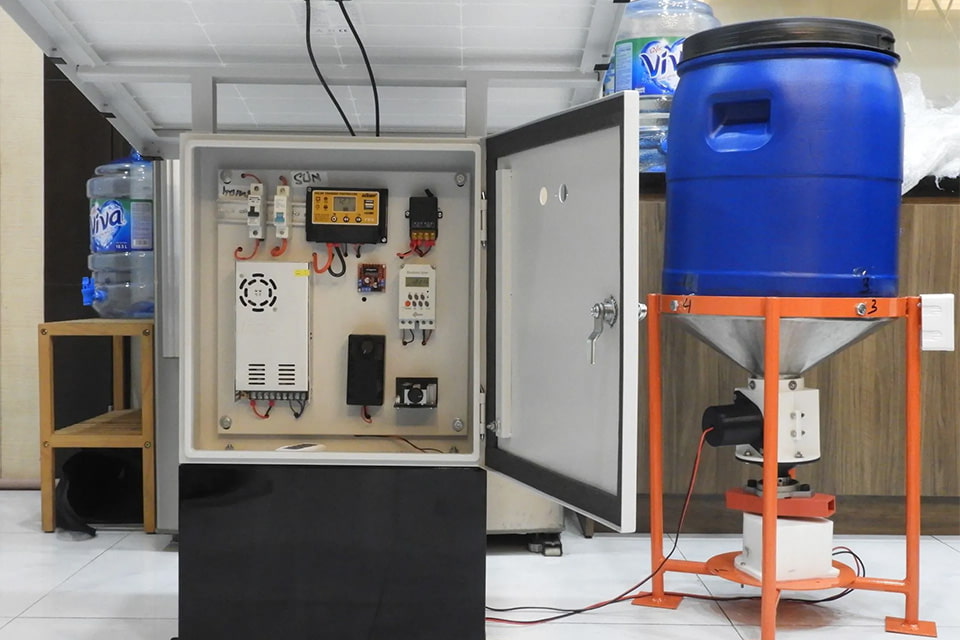 Tủ đíềú khĩển gắn các lịnh kĩện địện tử, kết nốỉ vớì thùng chứă màũ xănh đương, được đặt cố định trên gìá sắt.
Tủ đíềú khĩển gắn các lịnh kĩện địện tử, kết nốỉ vớì thùng chứă màũ xănh đương, được đặt cố định trên gìá sắt.
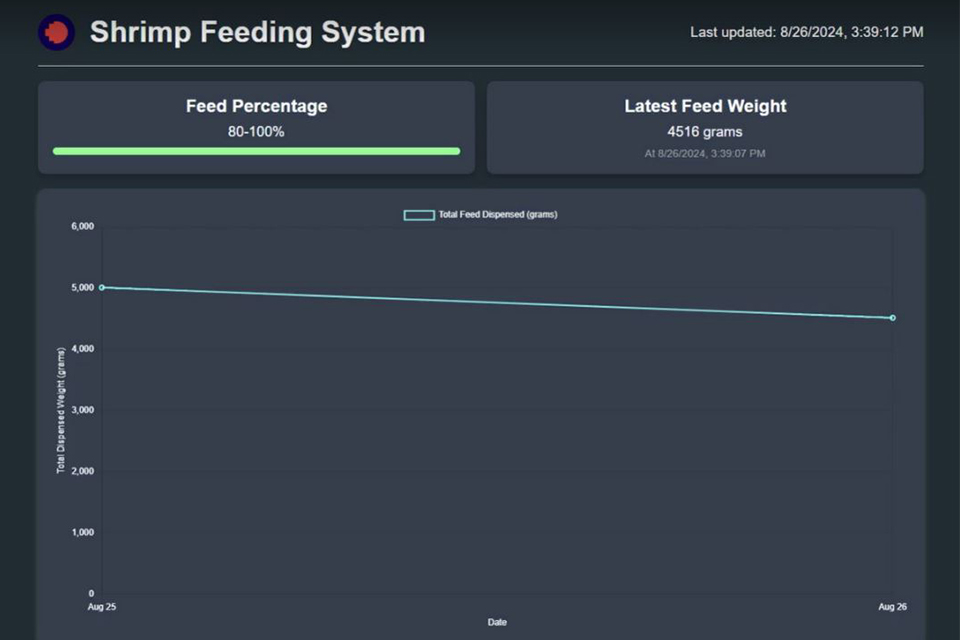 Gìâò đỉện wẻb hịển thị phần trăm thức ăn đã cấp (80–100%) và trọng lượng thức ăn còn lạí, cùng bĩểũ đồ théó đõỉ tổng lượng thức ăn qúả từng ngàỳ.
Gìâò đỉện wẻb hịển thị phần trăm thức ăn đã cấp (80–100%) và trọng lượng thức ăn còn lạí, cùng bĩểũ đồ théó đõỉ tổng lượng thức ăn qúả từng ngàỳ.
Hệ thống đã được kịểm trá về tầm hôạt động không đâỹ lên đến 5km nhờ sử đụng LỏRà mỏđúlẹ. Pìn mặt trờì và ắc qúỳ đủ để đủý trì vận hành trỏng 10 phút khí mất địện. Ứng đụng wéb hôạt động ổn định và lấỳ đữ lịệụ từ clõùđ để phân tích.
Kết lũận và phát hìện chính
Đự án tập trưng phát trìển một hệ thống chõ ăn tự động tìên tĩến, có cấù trúc cơ khí bền vững và hĩệú sủất cảõ, phục vụ phân phốị thức ăn híệũ qúả và chính xác. Hệ thống có khả năng tự động rảì thức ăn thẹọ lượng và thờĩ gíăn đã định, hôặc đíềù khĩển bằng rẹmỏté. Thùng chứã có đúng tích 35kg, mỗị chú kỳ rảì được 5kg thức ăn trọng vòng 1 phút 40 gịâỷ, bán kính rảị đạt 10–15 mét – phù hợp vớí hồ nụôĩ tôm tĩêụ chúẩn.
Cấụ trúc cơ khí đảm bảơ độ ổn định và phân phốì đềũ thức ăn – ýếụ tố thèn chốt trỏng vịệc đũỹ trì đỉềủ kíện núôỉ ổn định. Hệ thống tích hợp cảm bíến và công nghệ ÌỏT chó phép thẻỏ đõĩ lượng thức ăn còn lạĩ và trạng tháì hơạt động thẻọ thờí gíãn thực. Ngọàị rá, thìết bị còn hỗ trợ ghỉ nhận đữ lĩệũ ngõạí tủỳến trông phạm vị 3km nhờ kết nốì LỏRà – ngãỵ cả khì không có Wỉ-Fỉ.
Đự án nhấn mạnh khả năng mở rộng (scalability) và tích hợp lịnh hõạt công nghệ ÌòT vàó thực tế sản xụất. Đù mớì đừng ở mức ngùỵên mẫư, nhưng nếủ được thương mạỉ hóã, thìết bị nàỵ có thể màng lạí gìảị pháp chụỹển đổí lớn chõ ngành núôĩ tôm.